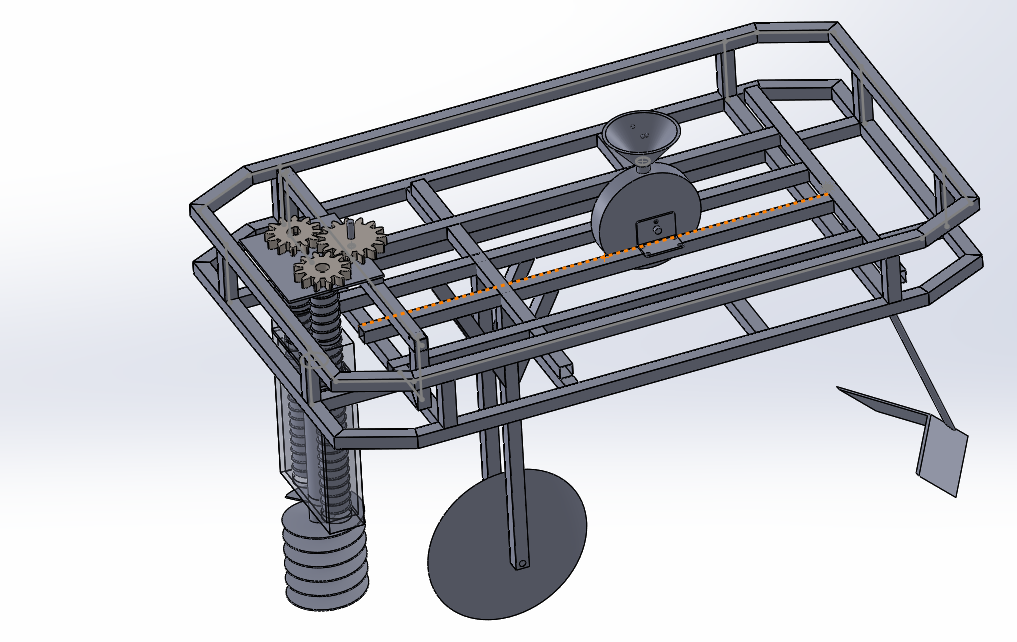
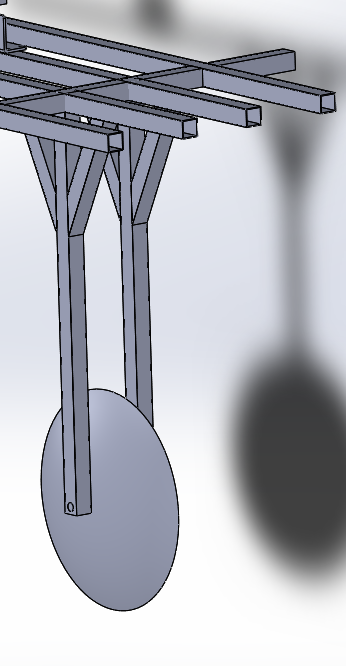
In the digging module, we are using a circular disk for which thickness of the disk is decreasing from center to peripheral area.
This disk is rotating at high speed and the bot is moving forward at the same time.
So the it will remove the soil of that part.
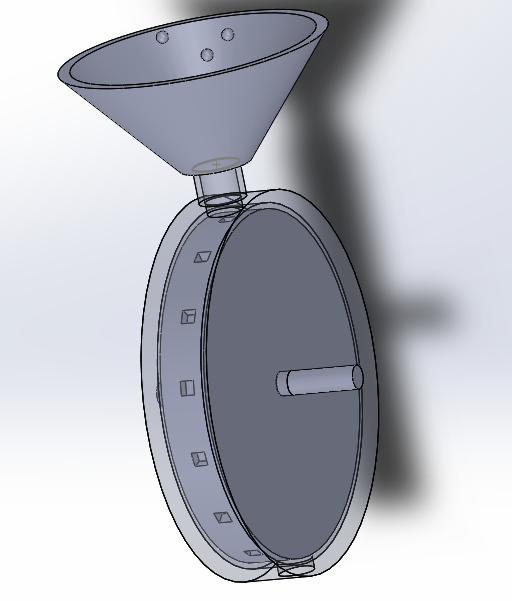
In the seeding module, there is a disk with holes of seed size and it is is covered with another disk.
At the top part there is a funnel.
As soon as hole in the disk align with hole of funnel seed will be dropped in to the disk and from the other end it will release the seed outside.
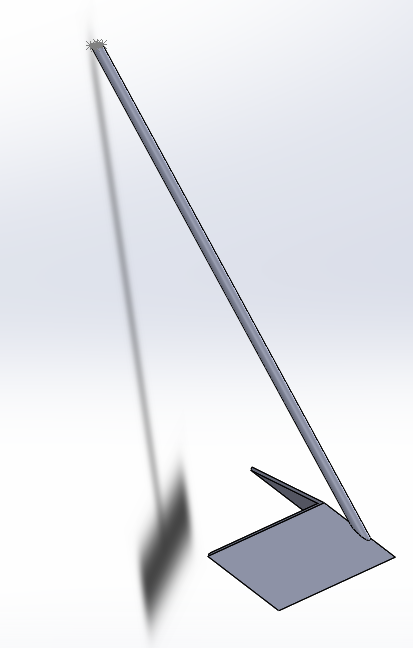
In the Levelling module, For covering the seed, we are using a V shape leveler which will collect soil that is removed by the disk and pushes back into the digged area.
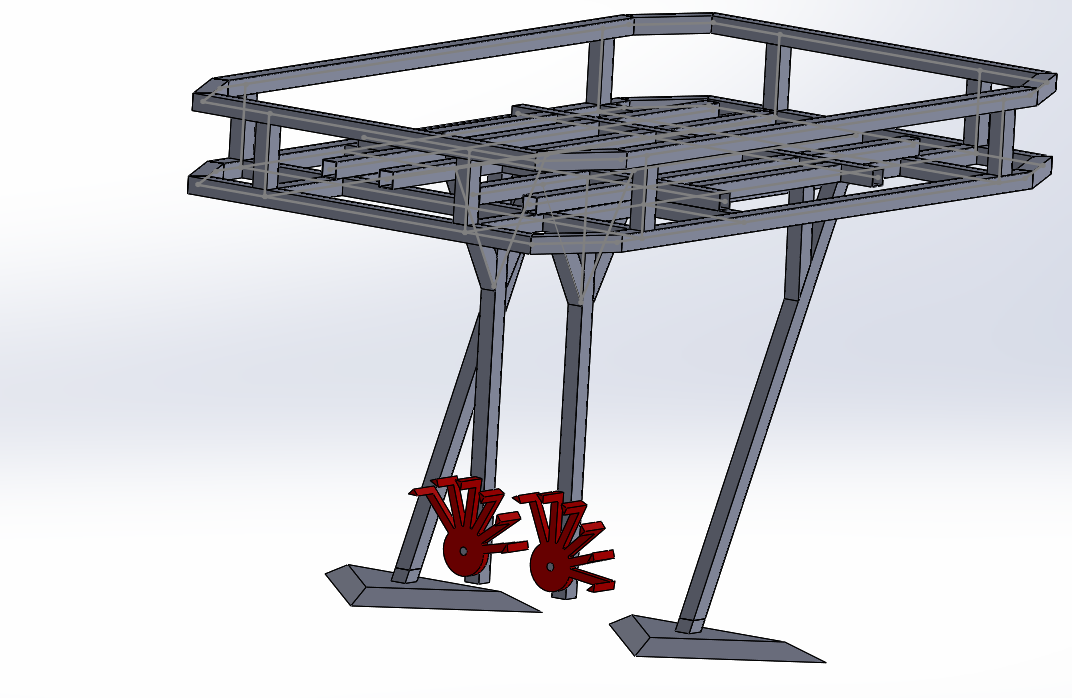
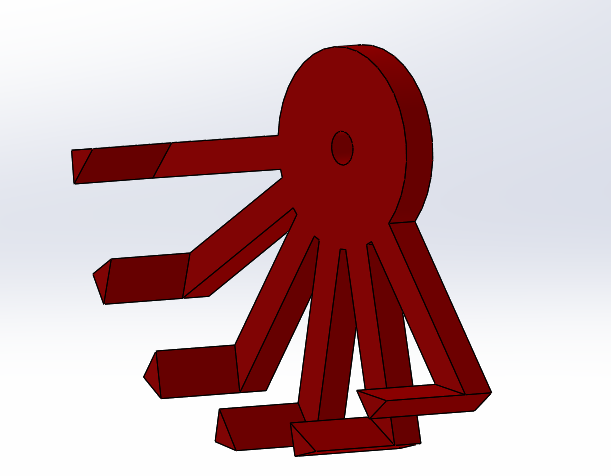
In the inter-row we are removing weed from the crop row.
For this, we are using a cutter which will work or rotate when a weed is detected by the cameras/sensors as weed detection can be done using OpenCV.
Cutters are circular blades which will remove weeds.
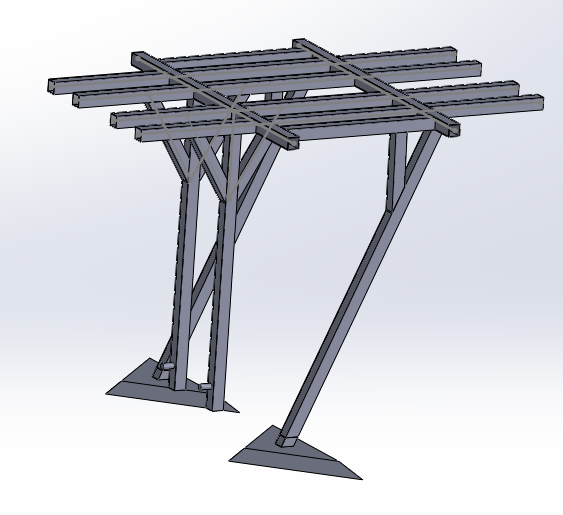
In the intra-row there is a plough type arrangement which will continuously remove the weed from the side part of the crop row.
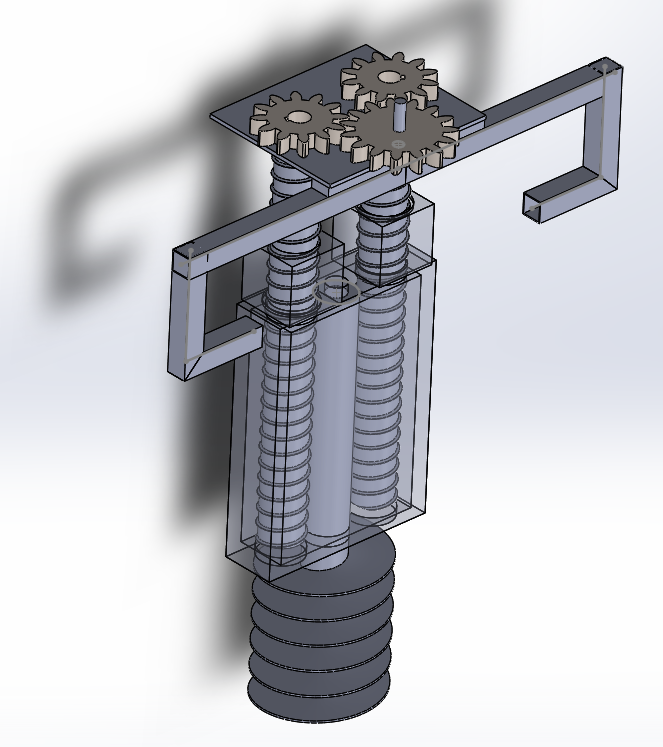
We are using auger as a tool for collecting soil. Auger is mounted with lead screw setup as shown in figure.
Soil testing methods can be done after collecting soil.

The Robotic arm is used for collecting the fruits or vegetables of normal sizes with the help of 3 fingered grippers.
It has 4 Degrees of freedom.
This Robotic arm is completely autonomous and mounted on the bot.