Our main aim was to implement the following modules : PID Algorithm ,
Sensor interfacing and thus this year we introduced ROS to aid in proper
control and simulation of farm bot.
We further aim to apply localization on farm bot and use Extended Kalman
filters to aid our process.
It is a package available for Linux-OS and is mainly made to control
robots.
It has been used to take data from the user(generally using a
controller).
Gazebo is a ROS Simulation software used to perform simulation of the
robot in real time environment.
In farmbot it is used to design the controlling part of the robot.
It is a tool in ROS used to visualize the model containing a map in
background.
We used it to visualize the location of robot.
Proportional Integral Derivative controller.
The control loop feedback device is used to regulate all the process
variables..
To reduce the error in the desired velocity and position of farmbot we
used PID control algorithm.
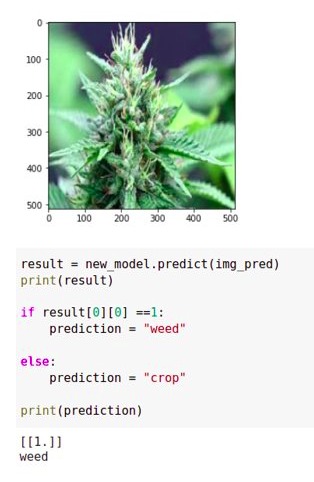
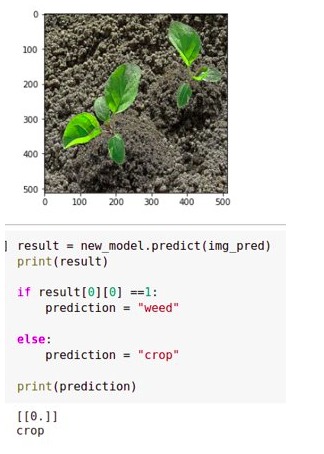
weed recognition is another important module of farmbot.
To recognize weeds from the crop fields, deep learning techniques are
used.
Deep learning models have a powerful learning ability that integrets
the feature extraction and classification processit allows machines to
identify and extract features from the images.